Датчики, радары, портативные устройства связи, системы GPS и видеокамеры – основные средства для получения информации водителем и автомобильной компьютерной системой. В сочетании с цифровыми географическими картами данные технологии позволят водителю доверить процесс вождения автомобилю, а самому заняться чем-нибудь другим.
Соответствующее заявление Тауб сделал в рамках Всемирного конгресса по интеллектуальным транспортным системам в Орландо, не преминув при этом напомнить аудитории, что GM является одним из пионеров в области разработки «беспилотных» машин. В частности, о том, что компания еще в 2007 году руководила совместным с Университетом Карнеги-Меллон проектом по созданию Chevrolet Tahoe The Boss, который самостоятельно проехал 60 миль в условиях плотного городского дорожного движения, совершая на дистанции такие маневры, как интеграция в поток движущихся транспортных средств, обгон, парковка и проезд перекрестков.
Кроме того, в ходе Конгресса американцы в очередной раз продемонстрировали концепт EN-V, где для обеспечения автономного управления технология GPS объединена с системой связи «автомобиль-автомобиль» и системой определения дистанции. Американцы также дополнили его функциями распознавания пешеходов, предотвращения столкновений, движения в колонне, системой автоматической парковки и возвращения к владельцу по команде со смартфона (когда водитель выходит из автомобиля EN-V, тот самостоятельно паркуется, а в нужное время приезжает обратно).
«Мы верим, что в ближайшие годы автомобильная промышленность сделает огромный шаг вперед в разработке систем активной безопасности, что позволит в значительной мере снизить уровень травматизма и смертности на наших дорогах, – заявил Тауб. – GM стремится оставаться лидером в развитии подобных технологий».
Тут, впрочем, он явно лукавит. В принципе, автомобильная промышленность была готова к таком прорыву не год и даже не два назад. Инженеры «Volvo» говорили об этом еще в 2008-м во время презентации системы City Safety. Кстати, тогда система еще не умела распознавать пешеходов, скутеры и мотоциклы, теперь она «видит» в буквальном смысле все, что попадает в поле зрения камер. Единственным серьезным препятствием шведы тогда назвали невозможность полноценной коммуникации между машинами. GPS, камеры и датчики рассматривались ими, как основной инструмент реализации идеи. Тем не менее, при парковке в ограниченном пространстве, а также при движении в плотном потоке, когда нельзя в полной мере гарантировать адекватную реакцию водителя машины, не оборудованной подобной системой безопасности, без более прогрессивных идей не обойтись. В частности, шведы предлагали устанавливать в бамперы всех новых авто специальные датчики, которые связывались бы друг с другом, определяя расстояние между машинами с точностью до миллиметра, ориентируя, таким образом, и контраварийные, и парковочные системы.
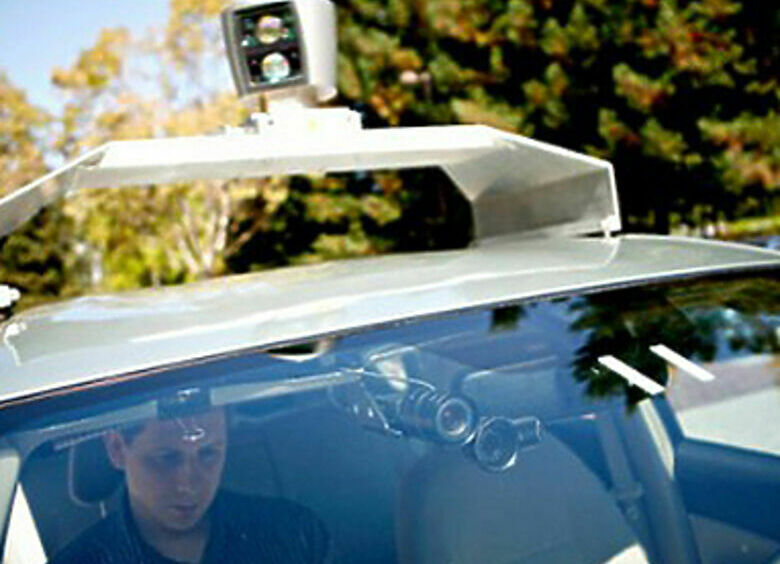
Еще один труднопреодолимый пока барьер – ориентирование на местности. «Автопилот» без точно и тщательно прорисованных карт – бесполезная игрушка, тогда как увязать эти две позиции – задача не из легких, так как это крайне сложно в первую очередь по технологическим причинам. Активно прорабатывающий этот вопрос «Google» уже два года тестирует несколько беспилотных машин (мало того, под давлением компании власти Невады начали разработку специальных правил для подобных машин). Они работают, но проблема в том, что сама по себе система, позволяющая им передвигаться крайне громоздка. На крыше и в салоне установлен целый комплекс лазерных дальномеров, радаров, видеокамер и сенсоров специальным компьютерным интерфейсом, отслеживающим траекторию движения в реальном времени и способным «прокладывать маршрут, используя высоко детализированные карты. Кроме того, сам по себе интерфейс – это компьютер с довольно сложной «операционкой». А это значит, что любой программный сбой приведет к крайне тяжелым последствиям.
Впрочем, по мнению того же Тауба, на окончательное внедрение полноценных беспилотных систем уйдет, как минимум, восемь лет. И этого времени для отладки всех составляющих должно быть более чем достаточно.
Владимир ЖИДКОВ